Gyakran idegenkedünk a robotoktól, még akkor is, ha azok csak a televízió képernyőjén állnak velünk szemben. A nem is olyan távoli jövőben azonban a fantasztikum tudománnyá válik, a tudomány pedig gyakorlattá: ennek következtében pedig kénytelenek leszünk hozzászokni, hogy az intelligens gépek egyre több területen veszik át az ember szerepét, még akkor is, ha olyan munkákról esik szó, mint a szőlőültetvények gondozása.
Az automatizáció a mezőgazdaságban a GPS-alapú erő- és munkagépek megjelenése óta hazánkban sem ismeretlen fogalom. A precíziós gazdálkodás egyik eleme a pontos sorkövetés, a műholdas kapcsolaton alapuló helymeghatározás. Ennek segítségével a traktor vezetője hajszálpontosan tudja a magágyat elkészíteni, a betakarítógép kezelője pedig akár szüret közben is elhagyhatja a fülkét.
A robotok megjelenése a szántóföldeken, ültetvényekben egyelőre külföldön is szokatlan jelenség, noha egyre több vállalat foglalkozik különböző célú mezőgazdasági robot fejlesztésével, illetve gyártásával (https://www.therobotreport.com/are-ag-robots-ready-27-companies-profiled/). Az elmúlt évek során leginkább betakarításra, a növények és a talaj állapotát felvételező munkákra, fenotipizálásra, talajmunkákra alkalmaztak robotokat (pl. Robotanist, Agrobot SW6010, Energid Citrus Picking System, ASI Forge Platform stb.).
Újabban azonban a speciálisabb, jobbára emberi erőt, gyakorlatot és tapasztalatot igénylő feladatokra is keresnek automatizálható megoldásokat. Ilyen feladat a szőlőtermesztés esetén a metszés. Általános tendencia, hogy a metszési munkálatokra egyre nehezebb munkaerőt találni. A probléma elsősorban a munkaerőhiány, de ha sikerül is megfelelő számú metszőt felfogadni, igen gyakran a hosszas betanítás ellenére sem tudják a minőségi termelésben elvárt metszésmódokat elsajátítani. Fokozza a gondot, ha egy ültetvényen belül többféle tőkeművelésmód és metszésmód is jelen van. A metszés mellett természetesen az egyéb feladatok, mint a talajművelés, gyomszabályozás, növényvédelem, zöldmunkák, szüret, de akár az ültetvény aktuális állapotának felvételezése is olyan feladat, amik elvégzésére mind kevésbé jelentkeznek a munkavállalók.
Ezekre a nehézségekre jelenthet gyógyírt a metszőrobotok fejlesztése. A robot szó hallatán először talán legtöbbünknek egy emberszerű, végtagokkal és fejjel rendelkező „valaki” jut eszünkbe, esetleg az autógyártásban már régóta alkalmazott karos szerkezetek. A szőlészetben azonban egészen másképpen néznek ki gépesített segítőink. Rendszerint kerekeken gurulnak, s bár karjaik is vannak, inkább jól felszerelt holdjárókra emlékeztetnek, mint ügyes „droidokra”. A következőkben a fejlesztés alatt álló, illetve a már gyártásra és forgalmazásra kerülő robotok közül mutatunk be néhányat.
Intelligent Autonomous Grapevine Pruner
Első alanyunk az Intelligent Autonomous Grapevine Pruner, mely magyarul talán Intelligens Önálló Szőlőmetsző névre keresztelhető. Gyártója, a San Diegó-i (USA) illetőségű Vision Robotics Corporation (VRC), 1999 óta foglalkozik különböző célú robotok fejlesztésével. Fő tevékenységei közé tartozik a robotok lokalizációjának és helyzetérzékelésének, a „gépi látásnak” nevezett automatizált funkciók, illetve mezőgazdasági robotok fejlesztése. Cikkünk szempontjából az utóbbi az érdekes, de természetesen az előzőek nélkül nagy hatásfokkal működő metszőrobot nem jöhetne létre. A robot első ránézésre egy, a sorra borított sátorra hasonlít, melyet traktor húz, de nem folyamatosan, hanem bizonyos időközönként (1. kép).

1. kép: Az Intelligent Autonomous Grapevine Pruner az ültetvényben
(Forrás: https://www.visionrobotics.com/vr-grapevine-pruner beágyazott videó)
Ami szembetűnő, hogy a kormánykerék forog, a pedálok mozognak, holott a vezetőülés üres. Tehát a vontatás nem igényel emberi beavatkozást. Ilyenkor 18 inches (körülbelül 45 cm-es) távolságot tesz meg a szerkezet, majd megáll. A kékszínű „sátoron” belül található maga a metszőrobot. Nem a szégyenlőssége miatt rejtették el ponyvák mögé: a két, metszőollóval ellátott karon, kamerák és lézeres szenzorok kaptak helyet. Ezek segítségével tudja a gép eldönteni, hol helyezze el az ollót. A haladás során a robot a kordonkar teljes hosszát szenzorosan letapogatja. A képeket analizálja, majd a programnak megfelelően háromdimenziós modellt készít: meghatározza, hol helyezkednek el a karok, a huzalok, a vesszők, továbbá az egyes rügyek (2. kép).
2. kép: Intelligent Autonomous Grapevine Pruner modellt készít a pontos metszéshez
(Forrás: https://www.visionrobotics.com/vr-grapevine-pruner beágyazott videó)
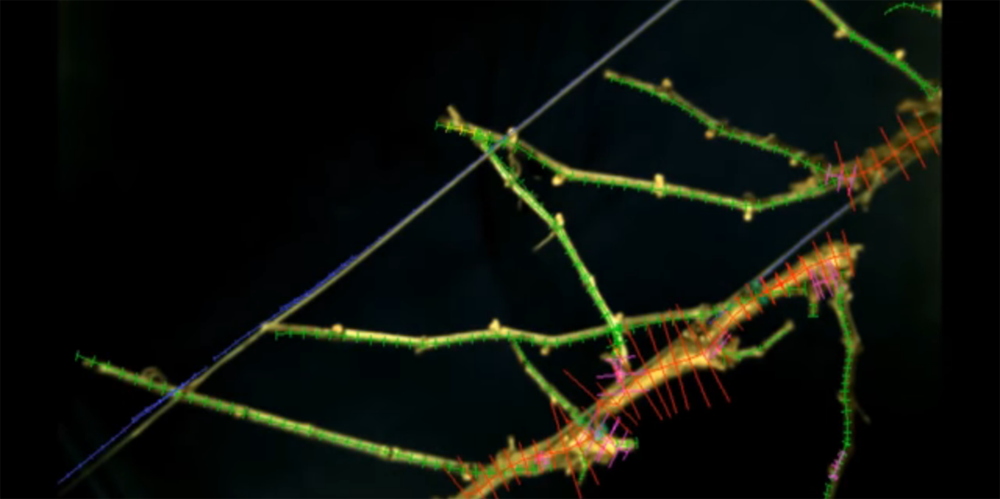
Ezután a vezérlő szoftver meghatározza, hogy a metszésmódnak megfelelően melyik rügy környékén kell a vesszőt elvágni, továbbá az egész karra tervet készít a terhelés beállításának érdekében. A folyamat végén már csak annyi van hátra, hogy a metszőolló a kalkulációnak megfelelő helyen elvégezze feladatát (3. kép).

3. kép: Intelligent Autonomous Grapevine Pruner metszés közben (megfigyelhetőek a kordonkaron a letapogatásra szolgáló zöld és kék lézercsíkok)
(Forrás: https://www.visionrobotics.com/vr-grapevine-pruner beágyazott videó)
A Canterbury Egyetem metszőrobotja
Első ránézésre az előzőhöz rendkívül hasonló szerkezetet készítettek az új-zélandi Canterbury Egyetem munkatársai. Külsőre ez inkább egy konténerre hasonlít, de a metszést végző robotkar és annak működési elve gyakorlatilag megegyezik. Kamerák, szenzorok és háromdimenziós modellezés segíti a metszés pontos helyének megállapítását. A program először meghatározza a vesszők helyét a karon, két dimenzióban, a szerkezet oldalfaláról nézve. Ezt követően a kamerákkal is végigpásztázva, a 2D felvételek alapján térbeli modellt készít.
Végül, a szerzők szerint a másodperc harmincad része alatt képes a rendszer dönteni adott vessző esetén, hol történjen a metszés. A modellezés után, ez a kar, a végén elhelyezett fűrészpengével vágja el a vesszőt. Mivel a fűrész a kar mozgása közben hozzáérhet más vesszőkhöz is, így biztonsági mechanizmust kellett beépíteni, hogy a véletlen metszéseket elkerüljék. Egyedül a kar pozícionálása lassítja a folyamatot, azonban tőkénként így is mindössze két perccel kell számolni, ami megegyezik egy metszőmunkás teljesítményével.
A munka során UR5 típusú, hat „ízülettel”, csuklóval ellátott robotkart építettek be. A San Diegó-i robotgyártó vállalt robotja ehhez a géphez képest látszólag gyorsabb metszésre volt képes, igaz, hogy az elérhető videóanyagok alapján ott a két kar egy előmetszett ültetvényben, viszonylag ritka vesszőjű fajtán metszett, míg a Canterbury Egyetem robotja egy meglehetősen sűrű Sauvignon blanc ültetvényben dolgozott.
Wall-Ye – MYCE_Vine
A következőkben egy, már sorozatgyártásra került modellel folytatjuk a sort. A francia Christophe Millot és Guy Julien cége, a Wall-Ye kisméretű, univerzális mezőgazdasági robotokat hoz forgalomba MYCE_Agriculture, illetve MYCE_Vine/Vigne néven. Előbbinek inkább szántóföldi termesztés esetén vehetik hasznát (pl. dinnyeszüret, gyomszabályozás, a leszedett gyümölcs ládába rakodása), utóbbi kifejezetten a szőlészetek számára készült. Ez a modell számtalan kedvező tulajdonsággal rendelkezik. Működése közben nem történik károsanyag-kibocsátás (még számottevő zaj sem), ugyanis energiaigényét napelemekkel fedezi, továbbá a beépített, napelemek által töltött (és a gyártó szerint 2 perc alatt cserélhető) akkumulátorai 10-12 órás további üzemidőt biztosítanak.
Ezáltal a robot akár éjjel-nappal képes a munkavégzésre, melyet okostelefonról lehet nyomon követni. A kataszteri adatbázis és a GPS-alapú helymeghatározás révén elkerülhető, hogy a gép más parcellákra tévedjen. Kameráinak köszönhetően pontos állapotfelmérést végez az ültetvényben, emellett a szüret előtt a fürtök érettségéről készít színképelemzéses felvételezést, illetve kiszámítja a várható hozamot. Ezeket az adatokat regisztrálja, így az ültetvényre vonatkozó információk a későbbiekben visszakereshetők. A kisebb dohányzóasztal méretű robot meglepően könnyű, mindössze 80-100 kg, így káros talajtömörödést nem okoz. Négy kereke egymástól függetlenül kormányozható, külön meghajtással, így a mostoha terepviszonyok sem jelentenek számára akadályt. Jelenleg egyetlen metszőollójával, függően a tőkék korától, állapotától, méretétől és a tőkeművelés módjától (Royat-kordon, Guyot-, és gobelet-művelés esetén tesztelték),
50 tőkét képes óránként megmetszeni (4. kép).

4. kép: A Wall-Ye gyártotta MYCE_Vine metszés közben. Nem mondhatjuk, hogy a kutyát nem érdekli
(Forrás: https://www.facebook.com/mycewallye/)
Ez 1200 tőke/nap teljesítményt jelent, ami igencsak nehezen hihető. Ráadásul ezt szeretnék óránként 150 tőkéig feljavítani. Várjuk a fejleményeket! Emellett mechanikai gyomirtásra is alkalmazható, három fűkaszája óránként 700-3.000 tőke körül képes ezt a műveletet megfelelően ellátni. Ezek után már csak az ára lehet kérdéses. Nos, ezt a csodagépet a korábbi 25.000 eurós ára helyett akár már 9.000 euróért viheti a boldog tulajdonos. Emellett, hogy más ne vigye el az ültetvényünkből, a gyártó lopásgátló rendszerrel szereli fel robotunkat. Ha kevésbé hiszünk a gyártóknak a metszési képességeit illetően, a már fentebb említett ültetvényfelmérés funkciója vitathatatlan.
Ezt támasztja alá az a tény is, hogy a gyártók a spanyol Universidad de La Rioja egyetemmel, a brit Sundance Multiprocessor Technologies nevű céggel és a portugál Symington Family Estates szőlészettel karöltve, uniós támogatással fejleszti tovább a MYCE_Vine-t: az egyelőre kísérleti stádiumban álló „VineScout”, vagyis „Szőlő Felderítő” fedőnevű robot egyik legfőbb feladata a tőkék vízháztartásának monitorozása azok hőképe és a lombozat hőmérséklete alapján, mégpedig menetközben, 5 km/h-s sebesség mellett. Láthatjuk, hogy ez a szerkezet inkább a minőségi szőlőtermesztést segíti majd elő.
Ted
A francia Naïo Technologies szőlőművelésre fejlesztett robotja egyelőre nem a metszési feladatokat látja el, hanem gyomszabályozásra alkalmazható. Az eddigiektől eltérően meglehetősen nehéz, 800 kg-os négykerekű gép óránként 4 km-t megtéve a soralja művelésben kap majd szerepet (5. kép).

5. kép: A Naïo Technologies fejlesztése alatt álló Ted inkább holdjáró, mint bájos robot
(Forrás: https://www.labecedaire.fr/2017/08/10/naio-technologies-robotise-travail-sol/)
GPS, kamerák és szenzorok segítségével találja meg a sorok alját, a gyomokat a környezettől eltérő hőképük alapján ismeri fel, így naponta 5-6 hektárt tud gyom mentesíteni. Akkumulátora 8-10 munkaórát tesz lehetővé. A jelenleg csak kapatesttel felszerelt szerkezet a későbbiekben fűkaszával, levélritkító és csonkázó adapterrel lesz továbbfejlesztve. Emellett a jövőben növényvédelmi feladatok ellátására, illetve ültetvényfelvételezésre is alkalmassá teszik.
VineGuard
A VineGuard (Szőlőőr) egy kísérleti stádiumban lévő permetező robot, melynek fejlesztése az izraeli Negevi Ben-Gurion Egyetemen az AgroBots projekt keretében zajlik. Feladata végigmenni a sorközben, ráfordulni a következőre, ez alatt permetezni. Megalkotásának másik célja pedig a kezelőszemélyzet növényvédő szerektől való megóvása. A pontos munka érdekében kamerákkal, szenzorokkal, magnetométerrel (a mágneses tér mérésére alkalmas műszer) szerelték fel. Az elektromos jármű útját előre meghatározzák, az útvonal megtartása differenciális GPS jelek alapján történik. A robotot a zord sivatagi körülményekre tervezték, a későbbiekben egyéb munkák ellátására is fejlesztik mesterséges intelligenciáját.
Vitirover
A Vitirovert Saint-Emilion-ban (Boredeaux-i borvidék) gyártják, kiötlője David Xavier Beaulieu, a Chateau Coutet egyik tulajdonosa. Ez a napelemes szerkezet egy viszonylag egyszerű felépítésű gyomszabályozó jármű, voltaképpen egy fűnyíró robot (6. kép).

6. kép: Vitirover napelemes fűnyíró robot
(Forrás: https://www.vitirover.fr/en-robot)
A juhászat analógiájának megfelelően a cég több robot együttes alkalmazását nyájnak nevezi, felügyeletét pedig egy ún. pásztor végzi, okostelefonon keresztül. Működése az egyre jobban terjedő robotporszívókéhoz hasonló, ez a 18 kg-os „elektromos bárány” is képes az egyes tereptárgyak (jelen esetben a tőkék, oszlopok) környezetét lenyírni. A sérüléseket elkerülendő, 1 cm távolságra közelíti meg a tőkét. Az időjárásálló, GPS-alapon tájékozódó robotot nem érdemes „meglovasítani”: ha felemelik, vagy eltávolítják az előre beprogramozott területről, lefagy – feloldása pedig csak PIN-kóddal lehetséges. Hátránya a tempójából fakad: óránként alig tesz meg 300 m-t, az ára pedig 5.000 euró darabonként.
*
Az előzőekben ismertetett esetekben láthattuk, hogy a szőlőtermesztés esetén a robotizáció néhány éven belül még nem váltja fel az élőmunkát. Az ültetvény állapotának feltérképezése azonban nagyon könnyen automatizálható feladat, ahogy már két példánál be is mutattuk, gyakran a fejlesztés kezdeti iránya erre mutat. A következőkben, hogy ne maradjunk az olvasó adósai ezen a téren sem, a különböző analíziseket végző robotokat vesszük röviden sorra.
Vinbot
A spanyol fejlesztésű Vinbot színes, nagyfelbontású kamerával és érzékelőivel felszerelkezve a minőségi szőlőtermesztés érdekében a tőkék vegetációs indexét (NDVI érték) határozza meg (7. kép).

7. kép: Vinbot az ültetvényben
(http://robohub.org/wp-content/uploads/2016/05/vinbot-agtech-agriculture-robots.jpg)
Ezeket az adatokat nyílt forráskódú (tehát továbbfejleszthető), felhőalapú szoftver elemzi (azaz előbb egy internetes adatbázisba jutnak, majd ott kerülnek feldolgozásra, tehát nem a robot végzi), az elemzés alapján pedig a tulajdonos háromdimenziós térképeken megjelenítve látja a parcellák hozamait. Emellett, az eredmények segítik a levélritkítás, a fürtritkítás és a szakaszos szüret idejének meghatározását. A jövőben további jellemzőket, állapotokat is vizsgálni fog a robot (a vitorla állapota, virágzás utáni vízellátottság, szárazságstressz, hőstressz, zsendülés, a lombozat színe és sűrűsége, bogyó- és fürtalak és -szín, betegségek, tápanyaghiány-tünetek).
A projekt érdekessége, hogy magyar vonatkozása is van: egyik tesztfelülete az Orgoványi Gazdaszövetkezet ültetvényei. Emellett portugál, román és olasz felek is segítik az uniós támogatást élvező gép megalkotását. A szerkezet akkumulátora 8 órás munkát tesz lehetővé, óránként egy hektárnyi területen tudja a lombozat és a fürtzóna állapotát felvételezni. A fejlesztők szerint a robot évente három alkalommal képes akár 168 hektáron monitorozni.
VineRobot
A nem túl fantáziadús névvel megáldott négy keréken guruló szerkezet a precíziós szőlőtermesztést szolgálja. Fejlesztése uniós támogatással a spanyol Universidad de La Rioja egyetemen zajlik, más partnerek bevonásával (pl. a már említett Wall-Ye, a Geisenheimi Egyetem stb.), célja egy személyzet nélküli jármű, mely az ültetvény különböző tulajdonságait monitorozza. A fejlesztést igényfelmérés előzte meg termelői részről, így a prototípus a következő tulajdonságokat vizsgálja: hozam, vegetatív növekedés, az ültetvény vízellátottsága és a termés minősége.
A megalkotói szem előtt tartották, hogy a mintavétel egy analízis során mindig jelentős beavatkozás az ültetvény ökológiájába, ezért ahol csak mód van rá, mindenképpen nem-invazív eljárásokat igyekeznek kidolgozni. Így a robot menetközben szenzorokkal képes a levelek nitrogéntartalmát és a fürtök antocianin-tartalmát vizsgálni. Emellett a mintázás, ha ember végzi, minden esetben valamennyire szubjektív: „ez a tőke nem tetszik valamiért… az a levél részben hiányos… kicsit arrébb szedek inkább talajmintát…” – az egyes benyomások miatt kevésbé lesz a mintavétel reprezentatív, még akkor is, ha a protokoll szerint járunk el. Erre jelent megoldást az önállóan munkát végző robot.
GRAPE
Uniós támogatással a Vitirover megalkotói és katalán-milánói közreműködők készítik a GRAPE, vagyis SZŐLŐ névre keresztelt robotot. A név a „Ground Robot for vineyArd monitoring and ProtEction” szavakból származik, melyet talán „Szárazföldi Szőlővizsgáló- és Védő Robot”-nak lehetne fordítani. Célja olyan, nehéz terepen mozogni képes robot kifejlesztése, mely a tőkék egészségi állapotának felmérésén túl a későbbiekben zöldszüretre, fürtritkításra, célzott vegyszer-kijuttatásra is alkalmas lesz. Jelen állapotában a robot az ültetvény, ezáltal a tőkék pontos, háromdimenziós modelljét képezi le.
*
Amint a fentiek alapján megállapíthatjuk, egyelőre nem kell attól tartanunk, hogy a robotok kiszorítják a szőlőtermesztésből az emberi munkát. Igaz ugyan, hogy utóbbit már nem könnyű találni, azonban az előbbit még nem egyszerű beszerezni. A mesterséges intelligenciával felvértezett gépeknek elég mindent egyszer elmagyarázni. Önmagára nem veszélyes, nem vágja le az ujját, nem fárad el, nem panaszkodik. Ha megfelelően programozták, pontosan végzi a dolgát, nem hibázik. Jelenleg még nehézkesek, lassúak, feladatkörük szűk, de ha az elmúlt néhány év tendenciáját vesszük alapul, ezen a téren is igen gyorsan fejlődni fognak.
Akkor azonban végleg kiszoríthatják az olcsó munkaerőt az ültevényekből, aminek a következményei még beláthatatlanok. Vagy megjelennek a modern „Ludditák”, akik életük rosszra fordulását a robotokban látják majd és igyekeznek a technológiát elpusztítani, vagy sorsukba beletörődve átengedik munkahelyüket a gépeknek. Akkor talán Asimov jóslata is beigazolódik, miszerint „a modern élet bajai épp abból erednek, hogy elszakadtunk a természettől”.
Nagy Attila, Dr. Bálo Borbála
SZIE Kertészettudományi Kar, Szőlészeti Tanszék, Budapest
Bruttó ár, mely tartalmazza az ÁFÁ-t és a szállítási költséget.
Az online fizetést a Barion Payment Zrt. biztosítja, MNB engedély száma:
H-EN-I-1064/2013