A modern technológiai és infokommunikációs fejlesztések eredményeként a növénytermelés területén – amelynek része a talajművelés – olyan tendenciák jelennek meg, amelyben a termelést a „teljes felületű (totális) technológiák” helyett a „helyspecifikus (parciális) technológiák” határozzák meg.
A tápanyagpótlásnál a korábban alkalmazott teljes felületre történő kiszórás helyett, a vetőmag környezetébe történő elhelyezéssel kísérleteznek. A növényvédelemnél a teljes felületű növényvédőszer-kijuttatást az egyes gyomnövények lézerrel való „kilövése” helyettesíti. Az öntözésnél a teljes felületű vízkijuttatás helyett, az egyes növények mikroöntözése lehet a jövő.
A talajművelési technológiák fejlődésénél az előzőekhez hasonló tendenciák jelentek meg. Így beszélhetünk hagyományos, csökkentett menetszámú és direkt vetéses talajművelésről. A talajművelési rendszerek változásának hatására létrejövő műveletcsökkentési folyamatot az 1. ábrán bemutatott „talajművelési piramis” jól szemlélteti.
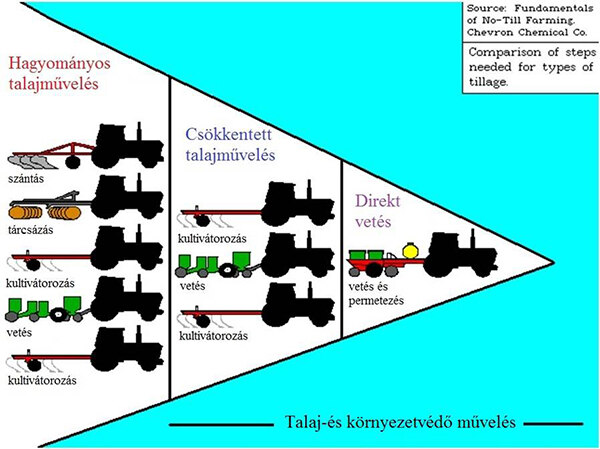
1. ábra A talajművelési rendszerek változása
A talajművelési technológiák fejlődése
A talajművelési rendszerek változását, fejlődését áttekintve látható, hogy kezdetekben, a talaj felső rétegének totális művelése (forgatás, lazítás, porhanyítás, keverés) volt a jellemző. Az idő- és energiaigény csökkentése érdekében a művelési menetek száma, mélysége és intenzitása csökkent, de a terület egészének művelése maradt.
A következő időszakot a talaj és a környezet védelme határozta meg, ami a tarlómaradványok felszínen, ill. a felszíni sekély rétegében hagyása jellemezte (lazítás, porhanyítás, keverés), vagyis kialakult a mulcsművelés. A jól megválasztott eszközökkel kialakított mulcsréteg alkalmas a felszíni erózió csökkentésére, a beszivárgás növelésére, de ugyanakkor alkalmas – száraz periódusban – a párolgás mérséklésére, ill. a talaj általi CO2-kibocsátás csökkentésére.
A mulcsművelés esetén a vetőágykészítés feladata részben átkerült a vetőgépekre. A mai, modern vetőgépek újdonsága a vetőelemre felszerelhető aktív sávtisztító és magágykészítő egység, amely a vetésminőséget rontó szármaradványokat, kisebb-nagyobb talajrögöket elsodorja a vetőelemek elöl, és megfelelő nedvességű tiszta, V-alakú magárkot hoz létre.
A precíziós technikák megjelenése viszont lehetővé tette, hogy ne a teljes felületet, hanem csak a vetősávot műveljük. Az ősz folyamán megmunkált sávokba tavasszal történik a vetés, ami csak akkor lehetséges, ha a vetőgép pontosan azokba a sávokba vet, amelyek ősszel megmunkálásra kerültek. Ez a ±2 cm pontosságú műholdas navigációval és RTK hálózattal tökéletesen megvalósítható.
A talajművelőgép fejlesztési tendenciáknak két fő iránya figyelhető meg:
- agrotechnikai – technológiai fejlesztések,
- műszaki (technikai) – infokommunikációs fejlesztések.
Agrotechnikai – technológiai újdonságok
A forgatásos alapművelés területén újdonságként a sekély szántás (10-14 cm) újbóli „felfedezése” jelentkezik. A sekélyszántó ekék természetesen nem tekinthetők valódi újdonságnak, de az új fejlesztések segítséget nyújthatnak a forgatásos alapművelés kisebb energiaigényű, ezért gazdaságos, vagyis versenyképes fenntartására, főleg gabonatarlók szántása esetén.
A nehézkultivátorok fejlődését és elterjedését nagyban segíti a talaj- és erózióvédelmi szempontból támogatott mulcstechnológia népszerűvé válása. Ezért a korábban is gyártott nehézkultivátorokhoz új, a mulcsképzést jobban segítő szerszámváltozatokat, ill. a műveletsor lezárására szolgáló henger/hengerborona változatokat (többféle gumihenger) fejlesztettek ki (1. kép).

1. kép Väderstad TopDown nehézkultivátor
Az új talajvédő- és környezetkímélő eljárásokban nagy sikerrel alkalmazzák a tárcsásborona – szántóföldi kultivátor kombinációkat, amelyekben igény esetén a kultivátortagok középmélylazító elemekre cserélhetők.
A tárcsás boronák területén robbanásszerűen terjednek a kompakt (más elnevezés szerint „rövid”) tárcsák. A nagy sikert annak köszönhetik, hogy a tárcsa lapok egyedi (vagy iker) csapágyazása eredményeként, a gép szerkezeti hossza nagymértékben csökkenthető, s ezáltal a tárcsa jól kombinálható más eszközökkel. Vigyázni kell azonban arra, hogy a nem kielégítő függőleges terhelés következtében a kemény, tömődött talajokon behúzási gondok jelentkezhetnek.
Az USA-ban alapvető változások kezdődtek a tárcsák, tárcsás boronák fejlesztése területén, amelyek elsősorban a tárcsalapok szögállásának csökkentésénél figyelhetők meg (2. kép).

2. kép A tárcsalap szögállásának hatása
A gyorsművelő kompakt tárcsák, az egyedi tárcsalap rögzítéssel, csapágyazással, hidraulikusan állítható munkamélységükkel és szögállásukkal lehetővé teszik a precíz művelést. Felhasználói igények alapján több cég fejleszt gyors művelő tárcsát, amely hatásosan dolgozik nagy mennyiségű szármaradványos területen, akár 16 km/h sebességgel. A tárcsákat úgy tervezték, hogy képesek legyenek felaprítani és bekeverni a szármaradványokat, de a talajfelszín maradjon egyenletes és alkalmas vetésre. A gyorsművelő vagy kompakt tárcsák nagy többsége rendelkezik a művelést lezáró hengerrel vagy hengerboronával (3. kép).

3. kép Kinze gyorsművelő tárcsa
A sávos és direkt vetéses módszereknél esetenként fellépő problémák kiküszöbölésére alakították ki a vertikális (réseléses) talajművelési rendszert.
A rendszer alapeszközének tekinthető sík vagy hullámos élű tárcsás csoroszlyák nem forgatják, nem keverik a talajt, csak függőleges réseket alakítanak ki, amelynek eredményeként a talajban nem alakul ki káros hatású záróréteg (4. kép). A vertikális talajművelőgépek szerszámai tehát nem vízszintes, hanem függőleges síkban dolgoznak, fejtik ki hatásukat. A vertikális talajművelés lehetővé teszi a csapadék talajba hatolását megakadályozva az eróziót, ugyanakkor a téli fagyás–olvadás ismétlődő folyamata segíti a talaj tavaszi állapotának kedvező kialakulását.

4. kép A különböző csoroszlyák kialakítása és munkája
A vertikális talajművelés amerikai népszerűségét a kismértékű talajbolygatásnak és magas munkasebességnek köszönheti. A vertikális talajművelőgépek tervezésénél további fejlesztési irányzatot jelent a műveletet lezáró hengerboronák alkalmazása, amely az utóbbi 5-6 év terméke.
A forgatásnélküli alapművelés lehetőséget ad a technológiai továbblépésre, vagyis a talaj-előkészítés és vetés összekapcsolására.
A művelet összekapcsolás agrotechnikai előnyei jól társíthatók az utóbbi idők ökológiai és ökonómiai elvárásaival. Ez a fejlesztési törekvés a magágykészítő–vető gépkombinációk rendkívül széles választékában testesül meg (5. kép). A ma már hagyományosnak tekinthető rotációs borona–vetőgép kombinációk mellett nagy számban készülnek a mulcsvetőgép változatok.

5. kép Amazone talajművelő–vető aggregát
Ezekben a kombinációkban a kultivátor mellett mindinkább meghatározók a kompakt tárcsák. A talajművelő eszköz–vetőgépkapcsolások/kombinációk mellett már egy-két éve találkozhatunk az önálló talajelőkészítő–vető gépekkel, amelyek tulajdonképpen vetőgépek, de talajművelő részegységük is van.
A precíziós talajművelés megjelenése magával hozta a sávos művelési technológia alkalmazását. (A sávos művelési rendszer nem új, de sikeres alkalmazásának feltétele a GPS-RTK hálózat megléte.)
A technológia sikere felkeltette a gépgyártók figyelmét, amelynek eredményeként többféle sávos vetőelem került kifejlesztésre (6-7. kép).

6. kép Sornyitó–sortisztító berendezések mulcsvetőgépekhez

7. kép Sornyitó–sortisztító–sorzáró elemek sávos vetőgépeken
Hazánkban a KITE által adaptált technológia és alapgép az Orthman 1tRIPr sávos talajművelőgép a legismertebb, amely az alapműveléssel együtt szilárd vagy folyékony műtrágyát juttat a leendő növény gyökérzónájába (8. kép). A két szintre kijuttatott műtrágya biztosítja a növény koncentrált tápanyagellátását a változó fejlődési szakaszban.

8. kép Talajművelő–vetőkombináció sávos műveléshez
Műszaki (technikai) – infokommunikációs újdonságok
- A mezőgazdaság műszaki bázisának (általános géprendszer) fejlődését a számítógéppel támogatott mezőgazdasági termelési rendszerben egyértelműen az elektronika, az informatika és az automatizálás határozza meg. Az általános fejlesztési tendenciákból nem maradhat ki a talajművelés gépesítése sem. Az egyes fejlesztési irányok rendszerbe foglalásának eredményeként jöhetnek létre az intelligens munkagépcsoportok.
Kverneland „intelligens” eke
A szántó gépcsoportok fejlesztésében korszakos irányzatot az elektronika betörése jelent. Az ilyen irányú fejlesztési eredmények mérföldkőnek számítanak a precíziós szántás megvalósítása érdekében.
A 9. képen bemutatott Kverneland i2500 váltvaforgató eke ISOBUS kapcsolatú elektronikus szabályozási rendszere lehetővé teszi az eke komplett beállítását a vezető ülésből, az IsomatchTellus, a Tellus Go vagy a traktor terminálja által. A változó talajállapot és a kedvezőtlen látási viszonyok között az egyenes vonalú szántás általában nehézkes.

9. kép Kverneland i2500 váltvaforgató eke
Az eke változtatható fogásszélességi funkciója RTK/GPS által szabályozva kiküszöböli ezt a problémát. Az opciósan beszerezhető gumihevederes mélységhatároló berendezés javítja az eke stabilitását és csökkenti a talajtömörítő hatást. A traktor vezetőfülkéjében elhelyezett terminálon (Isomatch Tellus, Tellus Go vagy a traktor saját terminálja) keresztül, a kezelő
- képes jobbra-balra átfordítani az ekét,
- követni egy előre kitűzött A-B vonalat,
- a húzás végén adott helyen kiemelni az ekét (ez különösen fontos szabálytalan alakú tábla esetén),
- munka helyzetből szállítási helyzetbe, ill. visszaállítani az ekét, s mindezt egyetlen gombnyomással.
Mindezen képességet a Kverneland Mechatronic Centre által kifejlesztett FURROWcontrol szoftver applikáció teszi lehetővé, felhasználva az eke hidraulikus fogásszélesség-állító berendezését és a traktor-eke ISOBUS kapcsolat rendszerét. Az előre kijelölt A-B vonal követését GPS jelek alapján automatikusan végzi. Az eketest fogásszélesség változtatásával képes az egyenes irány tartására akár sötétben is.
Kuhn „okos” eke
A Kuhn „Smart Plouging” ekéje a GPS alapú precíziós rendszer alkalmazásával az eketesteket automatikusan kiemeli és lesüllyeszti a tábla végén (10. kép). Ezzel a megoldással kiküszöbölhető a hagyományos szántás forgójánál kialakuló Z-formájú barázdaképződés (11. kép). Ez nemcsak időmegtakarítást, hanem munkaminőség-javulást és talajtömörség-csökkenést eredményez. Az eketestek tábla végi automatikus kiemelése és lesüllyesztése megkönnyíti a traktoros munkáját, ill. lehetővé teszi, hogy egy kevésbé gyakorlott vezető is megfelelő munkát végezzen.

10. kép Kuhn okos eke
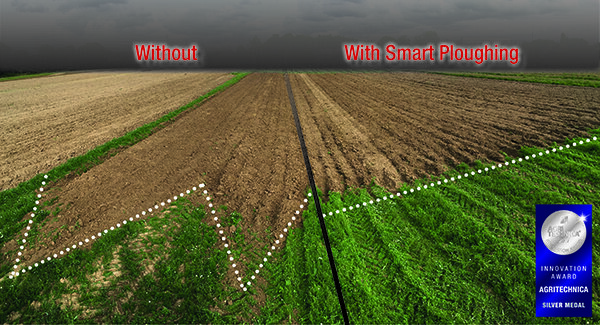
11. kép Táblavégi forgó képe hagyományos (baloldal) és okos eke (jobb oldal) alkalmazása esetén
Lemken Juwel 8V „okos” eke
Az ekén alkalmazott TurnControl Pro megoldás a Juwel 8V váltvaforgató ekét ISOBUS-kompatibilissá és teljesen elektronikus működésűvé teszi (12. kép). A berendezés alapkivitelben megvalósítja az automatikus ekeátfordítást, valamint a dőlésszög, a munkaszélesség (eketestenként 30 és 55 cm közötti) és a munkamélység beállítását.

12. kép Automatikus átfordítás és beállítás TurnControl Pro berendezésse
Az eke beállítási és működési paraméterei az univerzális terminál felhasználói felületén megjeleníthetők. Az eke tökéletes beállítása a vezetőfülkéből egy gombnyomással megvalósítható.
Case AFS Soil Command valós idejű kultivátor szabályzás
A vetőgép üzemelési sebességét a magágy minősége behatárolja, ezért a nagy sebességű vetés megvalósításának feltétele a jó minőségű magágy. Ha minden tökéletes lenne, akkor a vetőgép egyenletesen haladna és minden mag azonos körülmények közé kerülne, amely lehetővé tenné az egyenletes csírázást és kelést. A gyakorlat viszont azt mutatja, hogy a talajművelőgép helytelen beállítása, a nem megfelelő gyakorlattal rendelkező gépkezelő miatt a tavaszi magágy nem mindig tökéletes, de mivel a felszín alá nem látunk, ezért ez rejtett marad. A talajhibák következtében a vetőegységek „ugrálnak”, aminek következtében a mag elhelyezés egyenetlen lesz, ill. magkihagyás jelentkezik. Az egyenetlen tőtáv és mélység következtében a kelés is egyenetlen lesz, ami kedvezőtlenül befolyásolja a terméseredményt.
Az AFS Soil Command lehetőséget ad a magágy minőségének méréssel történő meghatározásához. Ezek az adatok lehetővé teszik a kultivátorok optimális beállítását és a jó minőségű magágy vetés előtti kialakítását, ami az egyenletes kelés és a jó termés alapfeltétele.
A gyári készítésű magágyszenzorokat a kultivátorszerszámokra célszerűen felhelyezve jutunk a magágy minőségének valósidejű visszajelzésére. A szenzorok jelzik a rugós szerszám mozgását (le-fel, előre-hátra) és figyelmeztetik a kezelőt az egyenetlen magágy kialakulására (13-14. kép).

13. kép AFS Soil Command működésének virtuális megjelenítése

14. kép Az AFS Soil Command monitorja
JD TruSet mélység határoló rendszer
A John Deere egy kompatibilitási szettel kiterjesztette a TruSet rendszer alkalmazását a John Deere 2730 kombinált talajművelő gépre, ami által annak négy részegysége külön-külön állíthatóvá válik. Ennek eredményeként a gép alkalmassá tehető a talajfelszínen lévő szármaradvány-mennyiség változásának követéséhez, mindezt menet közben a traktor vezetőfülkéjéből (15. kép).

15. kép A kultivátor működési jellemzői a TruSet monitoro
A TruSet rendszer alkalmazásával egy talajművelőgép beállítási módosítása 6 másodperc alatt végrehajtható, szemben a kézi állítás 12-20 perc időigényével.
Ez a képesség teszi lehetővé, hogy különböző szármaradvánnyal borított területeken vagy szezon közbeni állapot változásokra egyaránt reagálni lehessen, vagyis megvalósíthatóvá válik a termőhely-specifikus talajművelés.
Topcon/Norac mélységhatároló rendszer
A NORAC TDC rendszerrel a talajművelés is bekerül a high-tech technológiák közé, természetesen megfelelő traktor alkalmazása esetén. A rendszer az „állítsd be és felejtsd el” elven működik, ami azt jelenti, hogy automatikusan tartja a mélységet változó talajállapot és -felszín esetén is. Az automatikus rendszerrel csökkenthető a talaj tömörödése, a traktor kerékcsúszása nedves állapotok esetén, továbbá nő a hajtóanyag-hasznosítás és az időkihasználás mértéke.
A Topcon által gyártott NORAC keretmagasság-szabályozás egy automatikus mélységbeállítási rendszer, amely minden típusú, hidraulikus mélységszabályozóval rendelkező kultivátor számára alkalmas. A berendezés a talajfelületet ultrahangos érzékelőkkel „leolvassa”, és menetközben automatikusan beállítja a gépet a kívánt munkamélységre (16. kép). A rendszer működtetése és beállítása, bármely ISOBUS terminálon keresztül lehetséges.
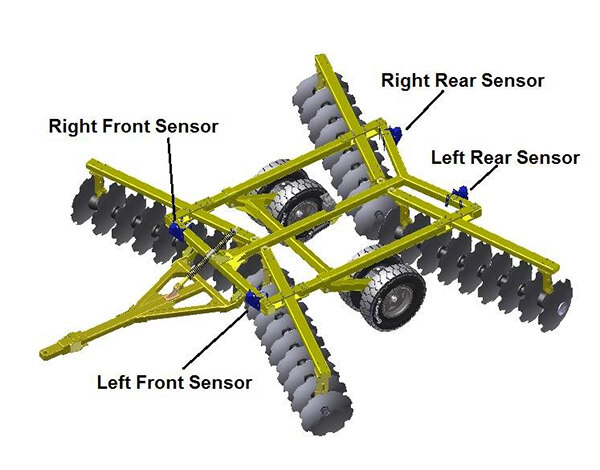
16. kép Szenzorok elhelyezkedése tárcsás boronán
Garford Robocrop kultivátor
A Garford Robocrop rendszernek négy eleme van:
- kamera rendszer
- számítógép és monitor
- hidraulika
- kultivátor
A sorokat kamera figyeli, amely a látható színtartományban működik. A számítógépes rendszer az optikai rendszer által közvetített képet dolgozza fel. A kultúrnövénysorokat beazonosítja és meghatározza helyzetüket a kultivátor helyzetéhez viszonyítva. A gép monitora többek között mutatja a haladási sebességet, a vezérlőrendszer helyzetét, a képminőséget és az állományt. A kezelő a monitoron látja, amit a kamera is lát.
A monitor menüjében lehet választani különböző sortávolságú kultúrák között, és ki lehet választani a növények méretét is. Ha nagyon nagy a terület gyomborítottsága, vagy nagyon kicsik a növények, esetleg sorhiányok vannak, akkor hibaüzenet jelenik meg a monitoron.
A rendszer elméleti pontossága 2 cm, a gyakorlatban viszont általában 5-7 cm védőtávolságot szokás alkalmazni. A jó eredményhez elengedhetetlenül szükséges a vetőgépek sortávolságának pontos beállítása.
A sorkövetést az erőgép hidraulika rendszeréről üzemelő hidraulikus munkahengerek segítségével végzi a rendszer. Sorkövetéskor az egész kultivátor mozog, nem a művelőtagok egyenként, ezért a kultivátor méretét a vetőgép méretéhez kell illeszteni. A keresztirányú elmozdulás 6 m munkaszélességig 30 cm, 6 méter felett 50 cm. A sorkövetés sebessége változtatható.
A Garford cég 2017 áprilisában bemutatta az optikai alapú szuperpontos Robocrop kormányzási rendszerének legújabb változatát. Az új, negyedik generációs kultivátorokat kompakt érintő képernyővel látták el, amely szöveges utasítás helyett piktogramokkal operálva felgyorsítja az egyes menük elérését. A Gigabit Ethernets képfelismerő kamerákat szintén tovább fejlesztették, miáltal azok több adatott és gyorsabban képesek továbbítani valamint megfelelően dolgoznak rosszabb látási körülmények között is. Az új rendszer pontossága különösen előnyös lehet a Robocrop InRow eRotor elektromos hajtású forgókapás kultivátoroknál (17. kép).

17. kép Robocrop InRow eRotor elektromos hajtású forgókapás kultivátor
Az új rendszer hat kamerával képes dolgozni, vagyis a kultivátor mind a hat precíziós kormányzású művelőtagja rendelkezik eggyel. Ezzel lehetővé válik, hogy a cég nagyobb gépei, amelyeket gabona vagy még nagyobb sorközű kultúrák művelésére terveztek, képesek teljes szélességükben precízen dolgozni, még egyenetlen felszínű területen is.
A jövő technológiái
A jelenlegi fejlesztéseket meghaladó munkálatok főleg az infokommunikáció területén ígérnek közeli és gyors eredményeket. A jövőbe mutató fejlesztések közül két terület érdemel különleges figyelmet:
- valós idejű, mobil szenzorálás (mérés) – valós idejű értékelés – valós idejű reakció (beállítás módosítás/változtatás),
- robotizáció.
SmartFirmer talajszkenner
A Precision Planting társaság kifejlesztett egy új eszközt, amelyet SmartFirmernek neveznek, s amely a farmerek számára bepillantást tesz lehetővé a felszín alatti világba. A kobalt házú eszköz a hagyományos vetőmag fix elhelyezését kombinálja egy optikai szenzor általi szkenneléssel, bemutatva ezáltal a felszín alatti történéseket. A SmartFirmer méri és térképezi a talaj szervesanyag- és nedvességtartalmát, valamint a növényi maradványok mennyiségét (18. kép).
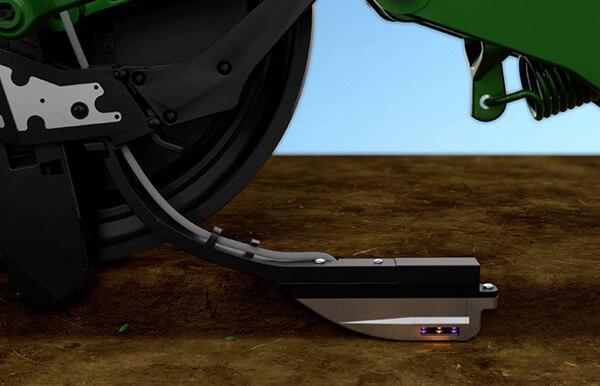
18. kép SmartFirmer talajszkenner
Ez a megoldás az első valós idejű szabályzási és térképezési rendszer, amellyel a farmerek képesek talaj szervesanyag-tartalmához igazított vetési adag automatikus szabályozására.
Például, ha a talaj szervesanyag-tartalma eléri a 3%-ot, akkor a kezelő automatikusan megnövelheti a kukorica tőszámot. Ha viszont olyan területre ér ahol a szervesanyag-tartalom alacsony, ott csökkenti a tőszámot annak érdekében, hogy elkerülje a vetőmagveszteséget a kevésbé produktív talajon.
A SmartFirmer mutatja a talaj nedvességtartalmát, amelynek ismeretében tudható, hogy a vetőmag megfelelő helyre került-e, vagy ha nem, akkor módosítani kell a vetés mélységét. A készülék észleli a barázdában lévő növényi maradványokat és tájékoztatást ad a barázda tisztaságáról. A szervesanyag-, ill. a nedvességtartalom meghatározásánál az optikai szenzor nem veszi figyelembe a növényi maradványokat.
Az észlelések végül is a vetőgépbeállítás módosításához vezetnek, például a sortisztító erejének növeléséhez, amelynek eredményeként a növényi maradványok eltávolíthatók.
TSM talajszkenner
A traktorra szerelt talajszkenner segítségével megállapítható a tömörödött rétegek felszíntől mért távolsága és a tábla kötöttségének heterogenitása. Az információ birtokában hidraulikus mélységállítású talajlazító/kultivátor és mélységszabályzó egység segítségével a szkenneléssel egy menetben (on-line), vagy előre elkészített applikációs térkép segítségével külön menetben (off-line) lazítható az adott réteg.
A talajszkenner elektromos vezetőképességet (ECa) mér millisiemens per méter (mS/m) mértékegységben, majd ezekhez az értékekhez hozzárendeli a tábla adott pontjainak földrajzi koordinátáit. A műszer alkalmas azoknak a pontoknak a megjelölésére, ahol az ECa-értékek függőleges irányban kétszeresére növekednek, ezen információk alapján táblatömörödöttségi térkép készíthető.
A mélységszabályzó egység (AutoDepth) mikroprocesszora értelmezi a szkenner által készített adathalmazt elektromos jel formájában, és kalibrációt követően módosítja az erőgéphez kapcsolt művelőeszköz munkamélységét (19. kép).

19. kép TSM talajszkenner
Robotok a talajművelésben?
A robotizáció fejlődésének eredményeit tanulmányozva felvetődik a kérdés, mikor találkozhatunk talajművelő robotokkal? A robotokat nagy sikerrel használják az állattartásban, megjelentek az első robot traktorok, de igazi talajművelő robottal még kísérleti szinten sem találkozhatunk. A talajművelési eljárások közül a sorközművelés/gyomirtás területén látható széleskörű kísérletezés (Bonirob, Naio – 20. kép, Kongskilde, Ferrari, ecoRobotix – 21. kép).

20. kép Dino pour Naio Technologies chez Xavier

21. kép ecoRobotix3 robot kultivátor
A kisméretű gazdaságok számára viszont a mini robotrajok fejlesztése (pl. Fendt Xaver – 2. ábra) jelenthet ígéretes jövőt.

2. ábra A Xaver robotrajrendszer elvi működési ábrája
A cikk a 2019. január 24-én a 37. AGROmashEXPO és a 9. AgrárgépShow mezőgép kiállítások keretében megrendezésre került „Új trendek és innovációk a talajművelés gépesítésében” című szakmai konferencián elhangzott előadás szerkesztett változata.
Bruttó ár, mely tartalmazza az ÁFÁ-t és a szállítási költséget.
Az online fizetést a Barion Payment Zrt. biztosítja, MNB engedély száma:
H-EN-I-1064/2013