Szőlő- és gyümölcstermesztés
Cikksorozatunkban önkényesen választott példákkal mutatjuk be, hogy a mezőgazdálkodás különböző területein milyen robotokkal találkozhatunk, amelyek közül néhány, akár már a közeli jövőben is megjelenhet a hazai gazdaságokban is. Sorozatunk első részében a zöldségtermesztésben alkalmazott robotok közül mutattunk be néhányat, jelen cikkben pedig a szőlő- és gyümölcstermesztésben alkalmazható robotok közül szemezgetünk.
A szőlő- és gyümölcstermesztésben a legnagyobb kézi munkaerőigényt általában a betakarítás igényli. Nem véletlen tehát, hogy az ide tartozó ágazatokban leginkább betakarítási robotokkal találkozhatunk. A gyümölcs-betakarításban eddig alkalmazott műszaki megoldások ismeretében a „robotok kontra élőmunka” kapcsán számos kérdés merül fel. Ilyenek:
- Képesek-e a robotok az egyenlőtlenül érő gyümölcsök között megtalálni a beérett, valóban betakarítható egyedeket, illetve fürtöket?
- A robotok által betakarított termények nem sérülnek-e, azaz alkalmasak-e pl. asztali gyümölcsként friss fogyasztásra, vagy csak ipari célokra használhatók?
- A robotok teljesítménye hogyan viszonyul a kézi betakarítás teljesítménymutatóihoz? Más oldalról: hány ember munkáját képes kiváltani egy-egy szüretelő vagy gyümölcsszedő robot? E kérdésnek különösen a robotok alkalmazásával összefüggő gazdaságossági megfontolások miatt van nagy jelentősége. (E témakörrel cikksorozatunk záró részében kissé részletesebben foglalkozunk.)
A robotok fejlődése különösen a képfelismerés és a robotmozgás terén szembetűnő. Ennek következtében egyre inkább pontosabbak és hatékonyabbak a hús-vér versenytársaiknál a legnehezebb mezőgazdasági munkahelyeken is. Az eddigi tapasztalatok alapján kijelenthető, hogy az előzőekben felsorolt kérdésekre a robotfejlesztők, illetve a kialakított robotok megnyugtató válaszokat tudnak adni már a jelenben is (és várhatóan a jövőben még inkább).
Robotok a szőlőben
Ahogy a jó bornak időre van szüksége, úgy a szőlő is nagy és folyamatos figyelmet, törődést és megbízható értékelési eszközöket igényel. Kiemelten vonatkozik ez a szőlő növényvédelmére és a betakarítására.
Mivel a kézi mintavétel és elemzés meglehetősen „macerás”, egy EU által finanszírozott nemzetközi konzorcium kifejlesztette a VINEROBOT (VINEyardROBOT) nevű, szenzoros technológiájú vezető nélküli földi járművet (1. kép).

Szemben a hagyományos mintavétellel, amikor a termelő jószerével csak a szemére támaszkodhat a szőlő fejlődése során, illetve betakarítás időpontjának kitűzésekor, a robot képes folyamatosan követni a növény fejlődését, a bogyók összetételének változását és ez alapján a betakarítás optimális időzítését meghatározni. A nyert információk a termelő számára okos telefonon vagy táblagépen is elérhetők.
A VineRobot kialakításának és felszereltségének köszönhetően önállóan és biztonságosan képes a szőlőből származó agronómiai és élettani adatokat lekérdezni, a szőlőültetvényekben jellemző bizonytalan környezeti feltételek mellett is.
A szőlőtermelés sikerét döntő módon befolyásolja a betakarítás milyensége. A gondosságot és odafigyelést igénylő munkát évszázadok óta kézi erővel végzik (2. kép). A munkaerő hiánya azonban ezen a területen is egyre nyomasztóbb. A feszítő gondok enyhítésére e területen is megjelentek a robotok.

A Wall-YE egy többcélú francia robot, melynek szőlő esetében a legfőbb célja az élőmunka kiváltása a metszés és a betakarítás során (3. kép).

A robot GPS segítségével működik. A fő szerkezeti elemei: hat kamera a termény megtalálásához, két megfogó-szedő kar a betakarításhoz (4. kép).

A robot négy egyenként vezérelt keréken mozog a sorok között (5. kép).

A hasmagassága, illetve a munkaszélessége 600 és 2000 mm között változtatható az alkalmazás körülményeitől függően. A robot akár 40%-os meredekségű lejtőn is képes dolgozni. A robot teljes tömege felszereltségtől függően 80-100 kg. A működéshez szükséges energiát akkumulátorokról biztosítják, melyek képesek 48 óráig újratöltés nélkül működni. Elterjedt megoldás az is, hogy az akkumulátorokat a robottal együtt szállított napelemek töltik fel. Okostelefonról vezérelhető és lopásgátlóval is fel van szerelve. A kereskedelmi forgalomban 15 ezer eurótól kapható, a szállítási idő – a forgalmazó információja szerint – 1 hét.
Robotok a gyümölcstermesztésben
Almaszedő robotok (6. kép)
A kaliforniai (USA) „Abundant Robotics” cég alapítója és ügyvezetője Dan Steere megfogalmazása szerint az ő almaszedő robotjuk az első a világon, amely kereskedelmi forgalomba került. A cég robotfejlesztésre vonatkozó küldetése: „…azért, hogy a világ növekvő népessége továbbra is élvezhesse az egészséges zöldségeket és gyümölcsöket, szükséges a termelékenység növelése, melyben az automatizálás kritikus fontosságú.” (1.)
Világszerte évente több mint 63 millió tonna almát termelnek. A legnagyobb termelő Kína, amely a világ teljes mennyiségének mintegy 40%-át adja. Az Egyesült Államok a második legnagyobb termelő, több mint 5 millió tonnával. Olaszország, Franciaország, Németország és Lengyelország Európa legnagyobb termelő országai.
Évente összesen több mint 5,5 millió tonna almát exportálnak, Franciaország, az USA és Chile, a vezető szereplők. A legnagyobb importőrök Németország, az Egyesült Királyság és Oroszország. Importjuk az összes export kivitel 33%-át teszi ki.
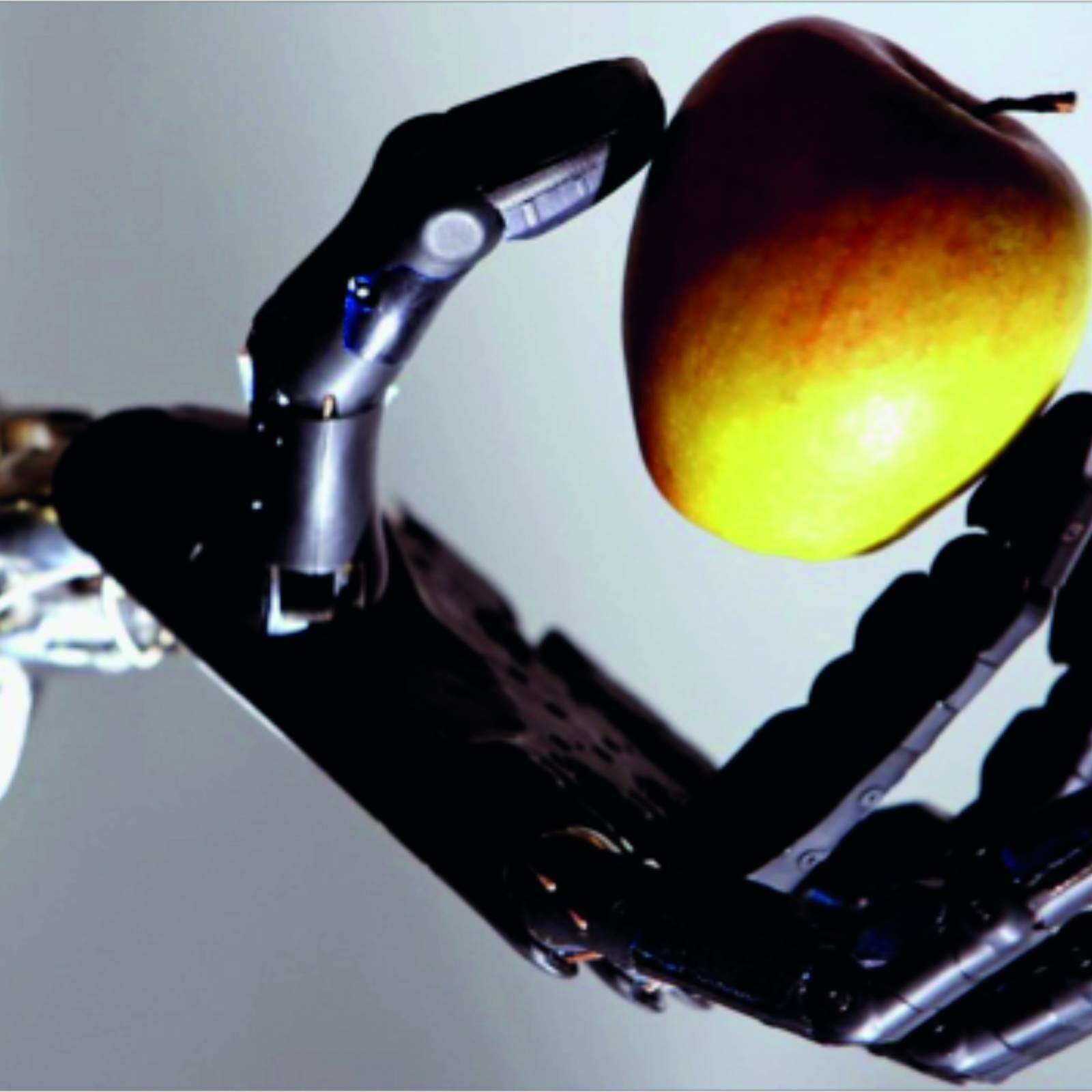
Az Abundant almaszedő robotját Ausztráliában már tesztelték és megállapíthatták, hogy a robot prototípusa az almákat „nagyjából pontosan” megtalálja és kellő gyengédséggel szívja le őket (7. kép).

Az igazgató véleménye szerint az almaszedő robotjuk, amely a szedőrendszer cseréjével más gyümölcsöket is képes leszedni, olyan áron kerül kereskedelmi forgalomba, amely gazdaságosan vált ki több tíz embert. (2.)
Fontos, hogy a robot éjjel is dolgozhat. A gyümölcs károsítása nélkül történő betakarításához a robot egy nagy vákuumtömlőt használ, amely „elszívja” az almát a fáról és egy gyűjtőtartályba juttatja a leszívott gyümölcsöket. (Az érdeklődők néhány további információt olvashatnak Dr. Szalay László cikkében az Agrofórum ez évi 6. számában ‹Az almaszüretelő robot nem álom többé›).
Csupán érdekességként mutatjuk a 8. képen azt az ugyancsak pneumatikus szerkezetet, amely gyümölcsválogatás céljaira használható. A robot képes az előre megadott paraméterek (pl. méret, szín) alapján adott halmazból kiválogatni a megfelelő egyedeket.

Az izraeli FFRobotics eltérő megfogó megoldást alkalmaz. Egy 3 villás szerkezet fogja meg a kiválasztott gyümölcsöt és egy csavaró-húzó mozgással választja le azt (9. kép).

Az alma egy gyűjtőedénybe kerül, ahonnét egy szállítószalag juttatja a tárolótartályba. A tesztek tapasztalatai alapján a robot több ezer gyümölcsre vetítve, 85-95%-os pontossággal válogatta ki és szedte le az érett gyümölcsöket. A robot teljesítménye is reményt keltő; a robot mintegy 10-szer több felhasználható gyümölcsöt gyűjt be, mint egy átlagos gyümölcsszedő munkás. Más oldalról: a robot akár tíz embert képes kiváltani, a kísérleti állapotában. A további fejlesztésekkel ez a mutató bizonyára fokozható. A berendezés viszonylag egyszerűen alkalmassá tehető más gyümölcsök – körte, barack, citrusfélék, mangó, gránátalma stb. – betakarítására is.
Az izraeli cég nyíltan vállalja a versenyt az amerikai Abundan Robotics-szel, amely a fejlesztéseihez a washingtoni Gyümölcskutatási Bizottságtól (Washington Tree Fruit Research Commission – WTFRC) 500 ezer dolláros támogatást kapott almaszedő robotjának kifejlesztéséhez.
Bogyósok (málna, eper)
A britekre nem jellemző a „Szedd magad”-mentalitás, azaz nem várható, hogy a potenciális fogyasztók maguk szedjék le a gyümölcsöket. A termelők folyamatosan panaszkodnak az egyre nyomasztóbb munkaerőhiányra, s miután a Brexit révén Nagy-Britannia kilép az EU-ból, könnyen veszélybe kerülhet a Kelet-Európából származó munkaerőkínálat. Márpedig a zöldség- és gyümölcstermelő gazdaságok nagyrészt az „európai migránsok”-tól függenek.
A The Guardian egy 2018-as jelentése szerint a szezonális kelet-európai munkavállalók – akik az Egyesült Királyság gyümölcsbetakarítóinak többségét alkotják – az angliai lehetőségeknél sokkal előnyösebbnek érzik a munkavállalást az olyan kontinentális európai országokban, mint pl. Németország. Ez azzal a veszéllyel jár, hogy nem lesz, aki leszedje a megérett termést, az ott fog elrothadni, ahol megtermett.
A Plymouth Egyetem Számítástechnikai részlegében, a Dr. Martin Stoelen irányításával folyó fejlesztőmunka eredményeként a nem távoli jövőben robotmunkások jelenhetnek meg a földeken, kiváltva a hiányzó kézimunkát.
A kutatók eredetileg a málna betakarítására szánták robotjukat, azonban egyre világosabbá vált, hogy a kialakított robot használható lesz más gyümölcsök szedésére is. A málna ugyanis nagy kihívást jelent: a gyümölcs könnyebben sérül, mint más bogyósok, továbbá a gyümölcsök elhelyezkedése és egyenetlen érése is nehezítő körülmény (10.a-10.b. kép).


Ami tehát ilyen feltételek között is jól működik, az vélhetően könnyen hozzáigazítható lesz más zöldségek, gyümölcsök betakarításkori jellemzőihez is.
A vizsgált robot kamerarendszere észleli az érett gyümölcsöt, majd a két válogatókar eléri a bokrot, óvatosan megfogja, majd leválasztja a málnát és beejti a gyűjtőbe. Ezt követően „keresi” a következő érett gyümölcsöt.
Az Octinion nevű belga start-up cég olyan eperszedő robotot fejlesztett ki, melynek munkasebessége megegyezik az emberével, csak hosszabb távon sem fárad el (11. kép).

A Cambridge-i székhelyű „Dogtooth Technologies” nevű start-up cég önálló robotokat fejleszt elsősorban bogyós gyümölcsök, pl. szamóca betakarítására (12. kép). A vállalat 2016-ban tesztelte prototípusát és azóta folyamatosan tökéletesíti azt.

Az EPSRC (Engineering and Physical Sciences Research Council – kb. Műszaki és Fizikai Tudományok Kutatási Tanácsa) által finanszírozott, „Vesca” néven ismert projektben, a vállalat együttműködik a Cambridge-i Nemzeti Mezőgazdasági Botanikai Intézet kutatóival, hogy fejlett számítógépes látás- és mozgástervezési rendszereket dolgozzanak ki. Mindezt azért, hogy a robotok biztonságosabban találhassák meg és gyűjtsék be a betakarításra megérett gyümölcsöket. A robot működésétől azt várják, hogy növekedjék az értékesíthető gyümölcsök aránya a veszteségek egyidejű minimalizálása mellett.
A robotok mindegyike több kamerával van felszerelve, mondta Ed Herbert, a Dogtooth Technologies alapítója és vezérigazgatója. A robotot nagy pontosságú GPS-koordinátákkal kapcsolták össze, ami lehetővé teszi a hatékony navigációt, illetve mozgást az ültetvényen.
A projekt célja egy olyan rendszer létrehozása, amelynek megközelítőleg ugyanolyan teljesítménye van, mint az epret szedő embernek. A robot becsült költsége gazdaságos volumen esetén 12.000 font.
A vezérigazgató véleménye szerint, a kamerákkal felszerelt robotok betakarítási funkciója csupán egy előny. Az élőmunka kiváltása mellett nagy jelentősége lehet mindazon információknak, amelyeket a robot szolgáltat. Ezen adatok birtokában olyan gazdálkodói döntések hozhatók, amelyek a gazdálkodás egészére igen komoly pozitív hatással bírnak. (4.)
A 13. képen egy hagyományos, szabadföldi eper betakarítására alkalmas robot megfogó-szedő szerkezeti megoldását mutatjuk.

*
A cikksorozatunk előző részében tárgyalt zöldségtermesztéshez hasonlóan, a szőlő- és gyümölcstermesztésben is számos robotizált megoldás került kialakításra. A jelen cikkben bemutatott (és teljességre egyáltalán nem törekvő) példák is jól szemléltetik, hogy az e területeken alkalmazható robotok elsősorban a leginkább munkaigényes területen, a betakarításában képesek az élőmunka kiváltására. A fejlesztők gőzerővel dolgoznak a világ számos országában azon, hogy robotjaikat tökéletesítsék és alkalmassá tegyék azokat többcélú hasznosításra.
Cikksorozatunk következő részében a szántóföldi növénytermesztésben használható robotokkal foglalkozunk.
Irodalom
A cikk számos internetes forrás felhasználásával készült. Ezek listája a Szerzőnél megtalálható. A jelen cikkben szöveg-közti hivatkozás a következőkre történik:
1. https://www.abundantrobotics.com/ (2019. 08. 04.)
2. Anane Ebenezer: Apple Picking Robots are finally here.
https://techgenez.com/apple-picking-robots-are-finally-here/ (2019. 07. 29.)
3. https://www.express.co.uk/news/science/1015568/Brexit-news-robot-fruit-picking-farmers-labour-jobs-AI (2019. 07. 28.)
4. https://www.theengineer.co.uk/red-harvest-robot-farmers-find-sweet-spot-for-strawberries/ (2019. 07. 28.)
Bruttó ár, mely tartalmazza az ÁFÁ-t és a szállítási költséget.
Az online fizetést a Barion Payment Zrt. biztosítja, MNB engedély száma:
H-EN-I-1064/2013